Uncrewed Aerial Vehicles

Convy
Reliable operation under high winds, high weather temperatures, Custom-made, On-board processing, Fully-Controllable, High-range communication, High battery time.
AQUAMON
Custom-built & fully integrated/tested, advanced onboard sensing & decision capabilities, PX4 autopilot, ROS-based autonomous mission support (manual + autonomous modes; ROS-based mission setting/supervision/verification), onboard edge-AI compute via Jetson AGX Orin carrier, communication range of up to 15 km, 3D LiDAR perception for mapping/obstacle avoidance, stabilized gimbal imaging.
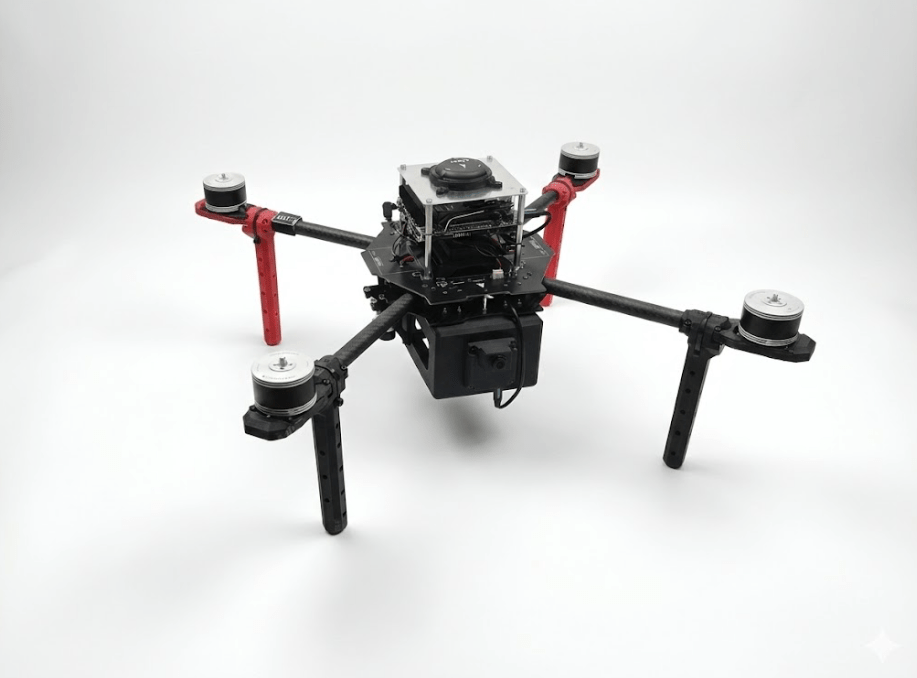
Custom UAV T650 Drone
On-board edge-AI compute (Jetson AGX Orin 32GB), RTK-grade positioning, 3D LiDAR perception for mapping/obstacle avoidance, stabilized gimbal imaging, long-range telemetry/control links (LoRa + ELRS 2.4 GHz), serviceable/adjustable/extendable platform.

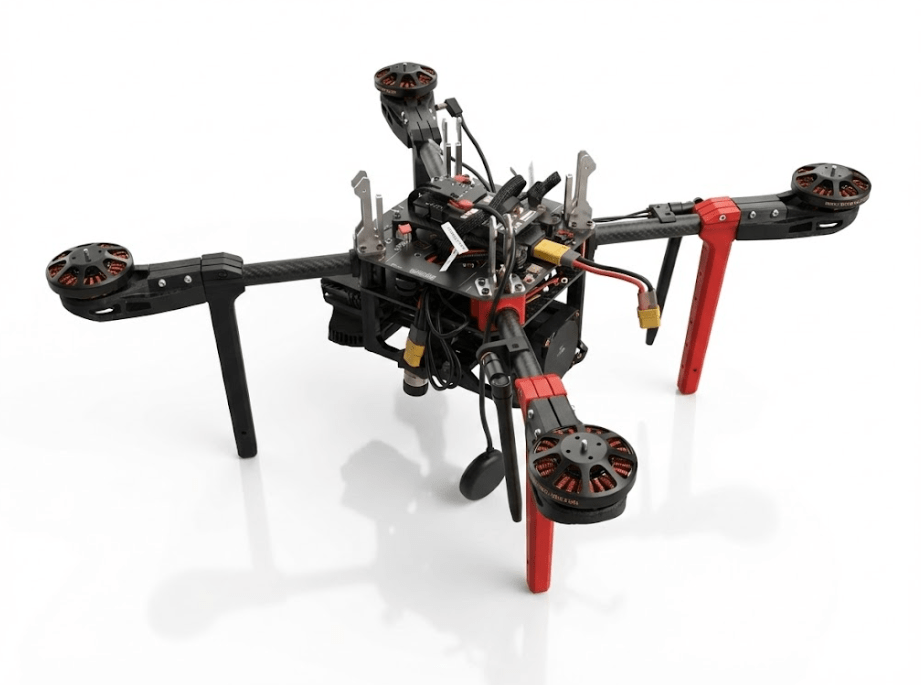
Custom X500 AI Vision Drone
Robust carbon-fiber development platform (fast assembly; Pixhawk-series compatible), PX4/ArduPilot-class autopilot (Pixhawk 4), on-board AI processing (Jetson Xavier NX, up to ~21 TOPS), stabilized imaging (3-axis Tarot gimbal + GoPro), depth perception for autonomy (RealSense D455), manual piloting via 2.4 GHz RC link (FlySky).

DJI Matrice 30T
All-weather enterprise UAV (IP55), foldable airframe for backpack carry, rapid deployment (quick-lock arms), integrated multi-sensor payload (wide + zoom + thermal + laser rangefinder), vision + infrared obstacle sensing, long-range O3 Enterprise link, up to ~41 min flight time.

DJI Mavic 3M
Compact multispectral mapping UAV with integrated RGB + multispectral cameras, RTK support for centimeter-level accuracy, omnidirectional obstacle sensing, 43-minute max flight time, and O3 transmission system. Designed for precision agriculture, surveying, and environmental monitoring.
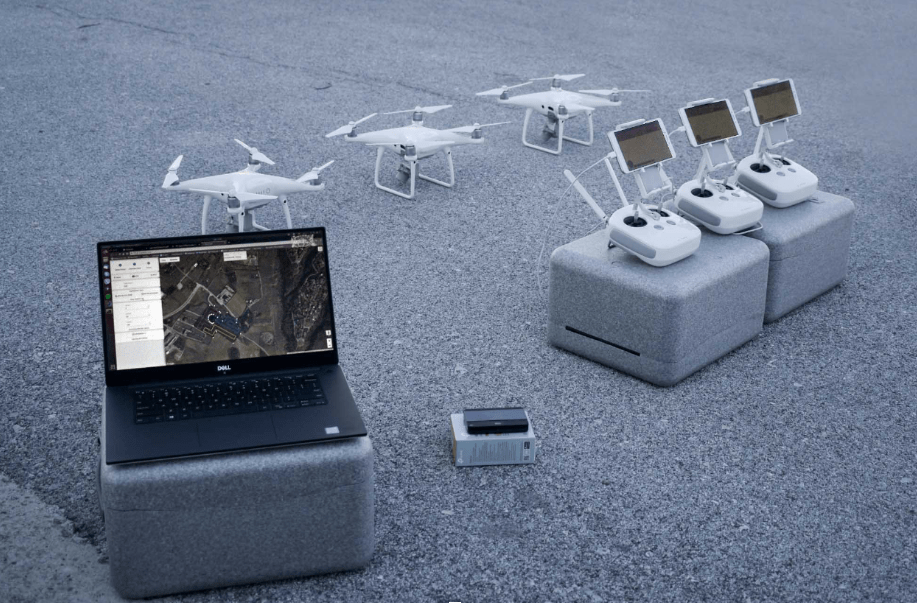
DJI Phantom 4 Pro
High-precision aerial imaging and photogrammetry, Stable flight and accurate hovering using vision positioning and GPS, Intelligent obstacle sensing and avoidance (forward, backward, downward), Autonomous flight modes (waypoints, orbit, terrain following), Reliable operation in moderate wind conditions.
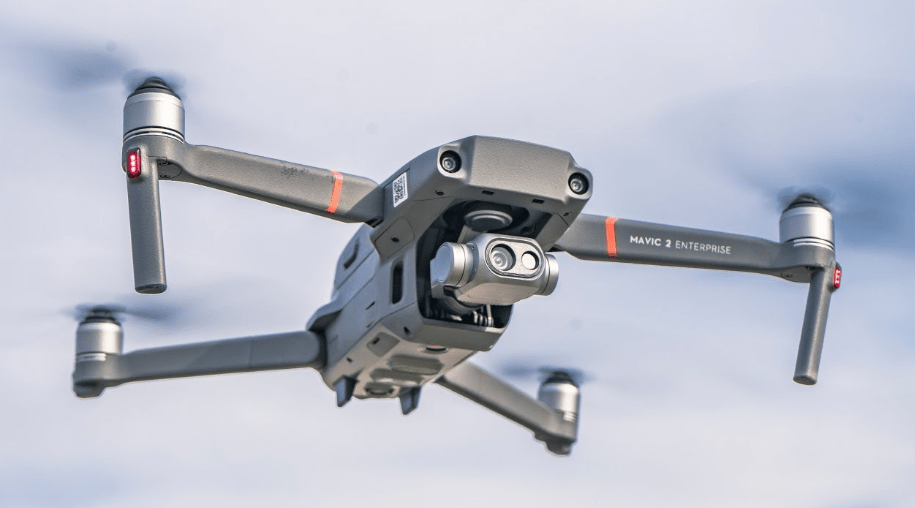
DJI Mavic 2 Enterprise Dual
Dual camera to collect visual, thermal, and fused information, Rapid deployment for time-critical missions (public safety, inspection, search & rescue), Thermal and visual data fusion for enhanced target detection, Autonomous and semi-autonomous flight modes.

DJI Mini 3
Lightweight and ultra-portable design (under 249), Extended flight time (up to ~38 minutes), 4K HDR video capture with true vertical shooting, Intelligent flight modes (QuickShots, Panorama, Return-to-Home), GPS-based stabilization and precise hovering.
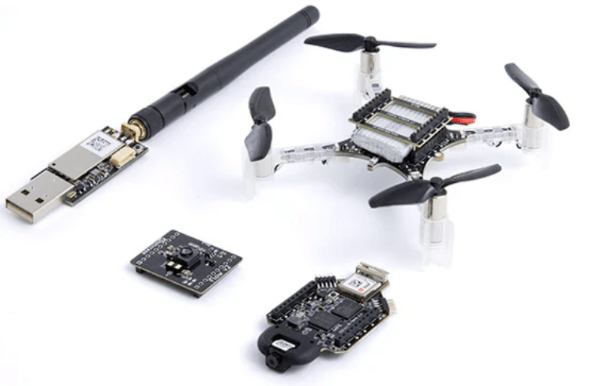
CrazyFly
Designed to work in swarms, Budget-friendly, Small-scale, Localization is captured externally, Manually moved with game controller, Computer-controlled via radio links or ROS packages, Expandable through hardware decks, Low-battery time.
Uncrewed Ground Vehicles

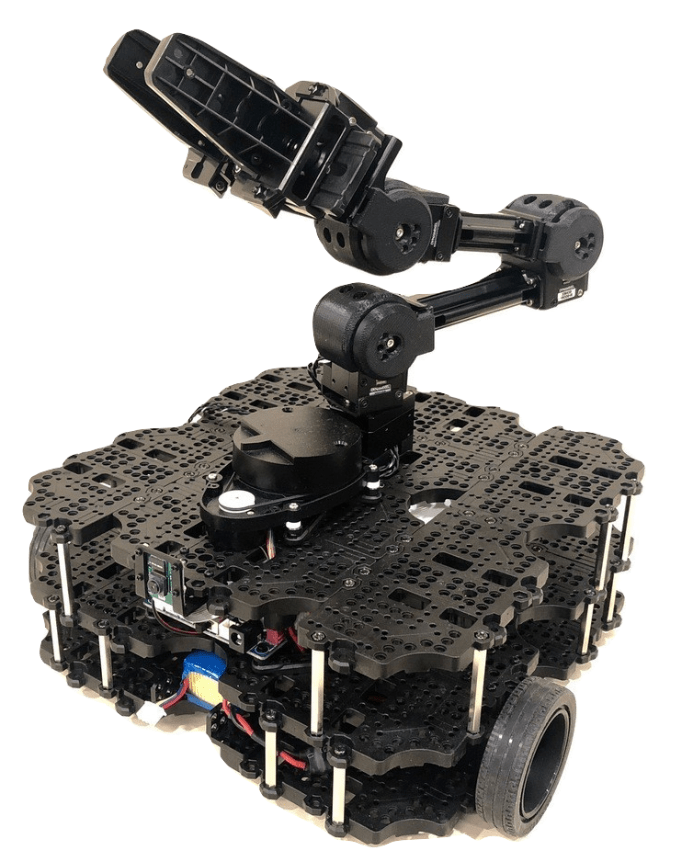
Custom 4WD UGV
Heavy-payload 4WD base (>95 kg payload; 1000x1000 mm galvanized-steel chassis), long-range teleoperation (≥7.5 km), autonomy-ready navigation stack (RTK-capable dual-band GNSS + IMU/barometer autopilot), on-board AI processing, industrial 6-DOF manipulation via UR5-class arm (5 kg payload, 850 mm reach), plus adaptive soft grasping via qb SoftHand2 Research (two synergies, 19 joints; 3 kg power grasp / 2 kg pinch).
Turtlebot3 waffe
ROS-based, modular/expandable (open-source ecosystem), on-board processing (Raspberry Pi 4 + OpenCR), 2D LiDAR-based SLAM & autonomous navigation, mobile manipulation support (MoveIt + Gazebo tooling).