Holistic Suites
Cooperative multi-UAV coverage mission planning platform for remote sensing
Advantages
- • Mission planning for complex-shaped ROIs with multi-UAV deployment focus
- • Coverage-path backend optimized via simulated-annealing-based optimization for grid methods
- • Clear “platform” framing (not just algorithm code): online mission generation + operational intent
Precision agriculture mission design + analytics pipeline (mission → orthomosaic → insights → follow-up mission)
Advantages
- • End-to-end workflow: flight planning + orthomosaic + vegetation health estimation
- • “Closed-loop scouting”: detects problematic areas, then auto-designs follow-up UAV mission to collect more data
- • Includes weed detection module trained on project dataset + seasonal timeline view for field history
Algorithms
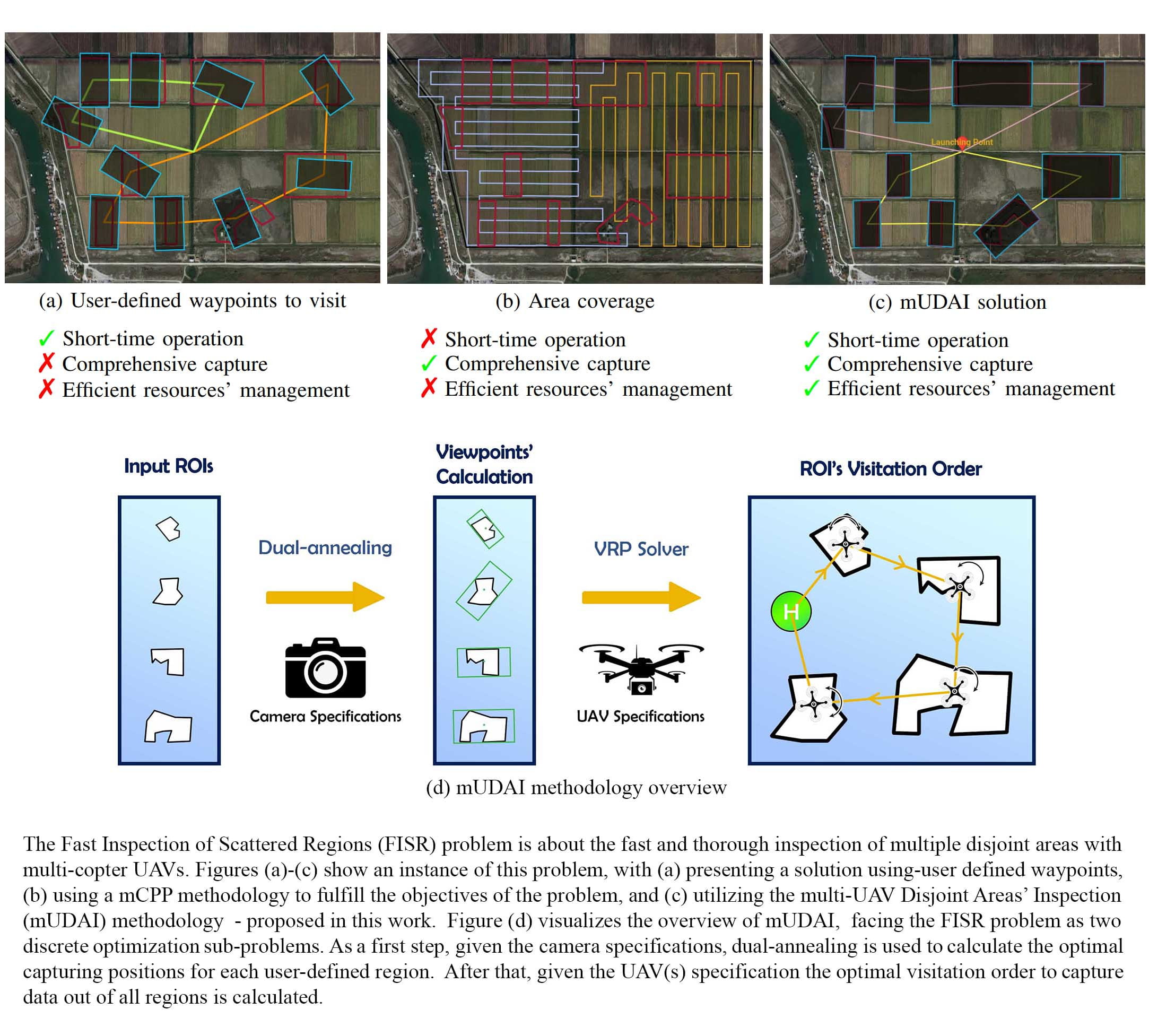
Fast Inspection of Scattered Regions via efficient planning for multi-UAV Disjoint Areas Inspection
Advantages
- • Targets scattered, non-connected ROIs where classic CPP can be inefficient
- • Structured as two-stage optimization: viewpoint selection + time-minimizing trajectories under vehicle constraints
- • Validated with real-world UAV deployments (not simulation-only)
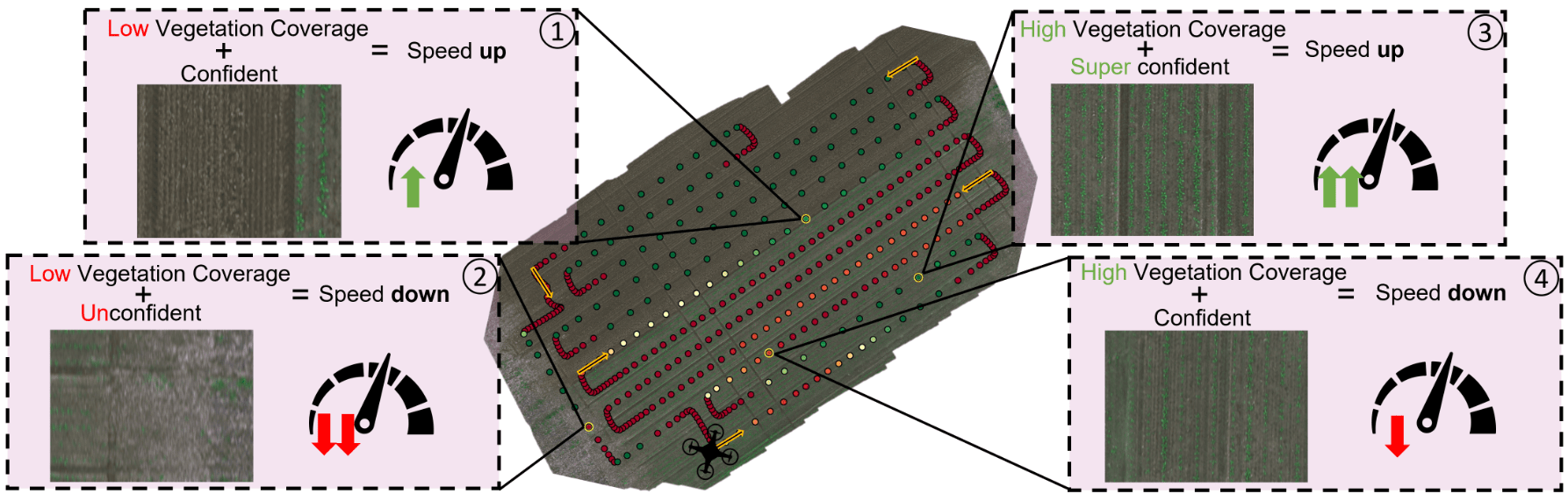
Active sensing coverage with online speed regulation from crop/weed perception
Advantages
- • Adjusts motion online based on (i) relative amount of detected classes and (ii) detection confidence
- • Uses deep learning segmentation for crop/weed identification in the loop
- • Explicitly positioned as “overcome missing important data” by reallocating attention during scanning
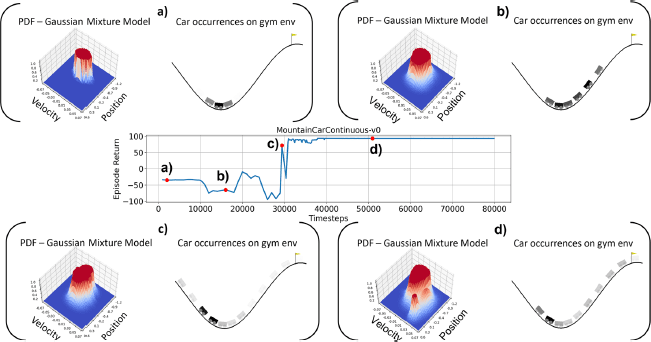
Actor-Critic with reward-preserving exploration signals (off-policy, model-free)
Advantages
- • Injects extra exploration drive without blurring environment rewards (core design goal)
- • Computes instantaneous novelty via Gaussian Mixture Model (GMM)
- • Packaged with runnable experiments and benchmark environments (per repo instructions)
Distributed plug-n-play optimization for multi-robot objectives with non-computable costs
Advantages
- • Designed for missions where analytic cost unavailable (unknown dynamics/environment/sensor nonlinearities)
- • Handles operational constraints, supports time-varying objectives, and emphasizes fault tolerance
- • Methodology grounded in CAO and convergence behavior aligned with block coordinate descent framing
Divide Areas algorithm for optimal multi-robot coverage path planning (obstacle-aware)
Advantages
- • Systematic area division for team coverage under prior-defined obstacles
- • Strong baseline/reference algorithm with paper + mature repo history
- • Large ecosystem of integrations/demos referenced from project materials
Simulators
AI-ROS framework for natural-language robot planning and execution (text/voice → ROS actions)
Advantages
- • Focus on “human-level planning” via natural-language interface over ROS architecture
- • Designed to work with any LLM (framework framing), bridging user intent to robot behaviors
- • Open-source “robotic library suite” positioning supports adoption beyond one robot model
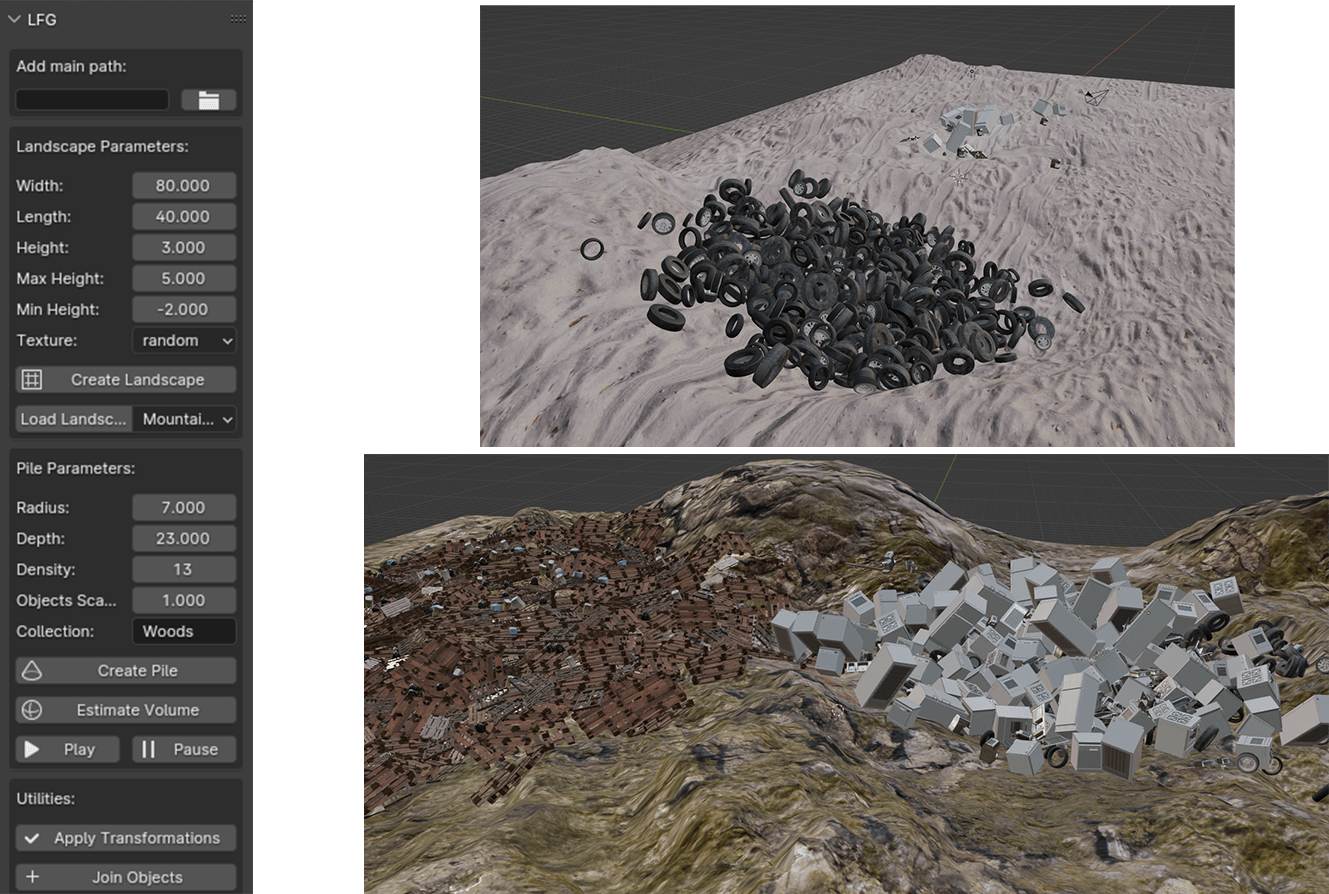
Blender add-on for realistic large-scale 3D landfill generation with volume/area estimation
Advantages
- • Generates diverse landfill scenes via landscape + pile generation utilities (tool is explicitly structured into parts)
- • Produces volume and area estimates, enabling benchmarking/evaluation alongside visuals
- • Practical packaging for users (zip + addon workflow) encourages “try now” behavior
OpenAI Gym environment for exploration/coverage of unknown terrains with procedural generation
Advantages
- • Explicit goal: bridge DRL methods with exploration/coverage of unknown terrain
- • Gym-compatible packaging enables quick benchmarking with common RL pipelines
- • Companion paper referenced directly from repository (good “research-to-code” loop)